SPM, STM, AFM
Scanning Probe Microscopy (SPM), especially Scanning Tunneling Microscopy (STM) and non-contact Atomic Force Microscopy (ncAFM) in Ultra High Vacuum (UHV) or in defined atmospheres like Near Ambient Pressure (NAP) enable high resolution imaging and spectroscopy with atomic resolution. Stability is in state-of-the-art SPMs, like the Aarhus series, no issue. Results are reliably obtained on a daily base. Modern dynamic sensors, like the Kolibri-Sensor, even provide the possibility to measure STM, giving the access to the electronic information, and ncAFM, with access to mechanical information, at the same time. Combining this with the spectroscopic information single atom identification is possible. The Aarhus is also available in a NAP-version allowing studies of surface reactions at atomic level at the pressures between UHV and 100 mbar.
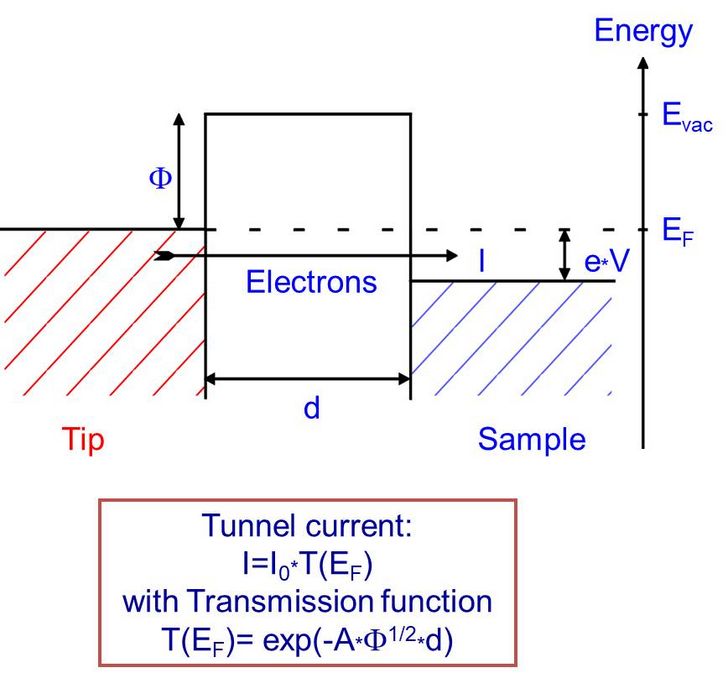
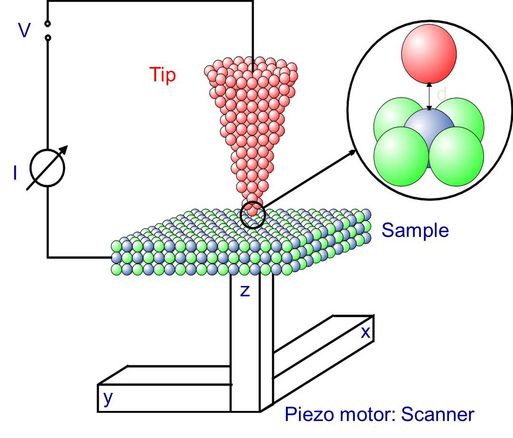
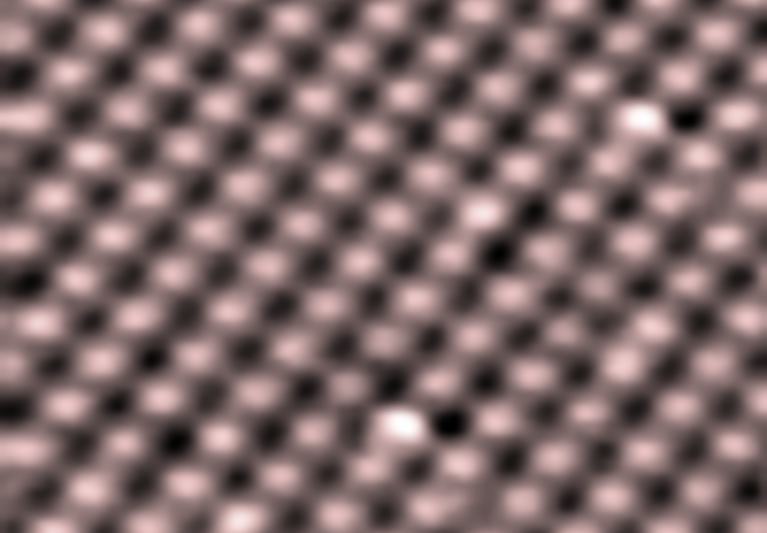
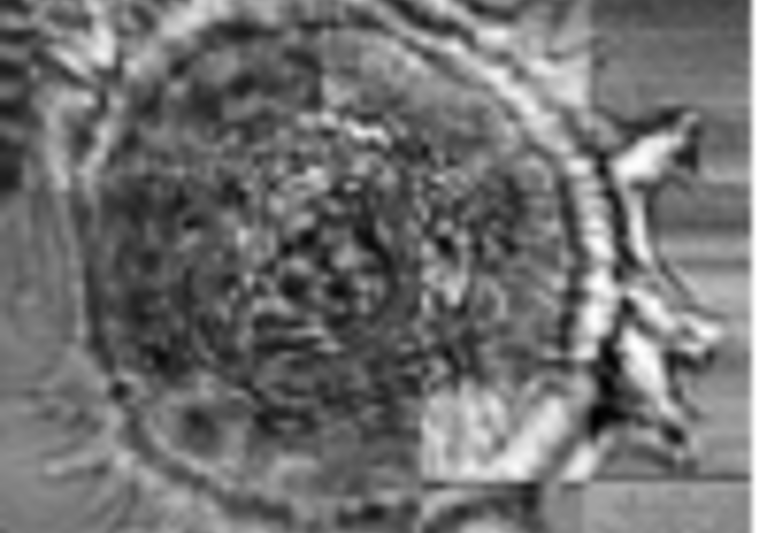
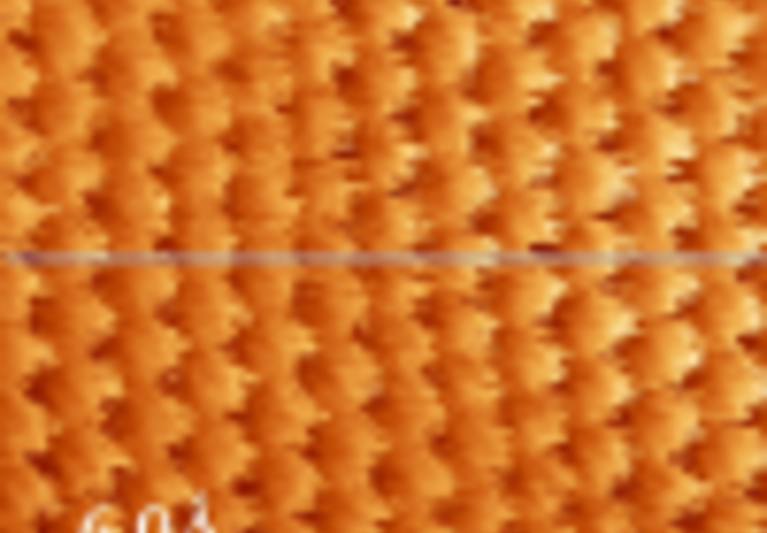
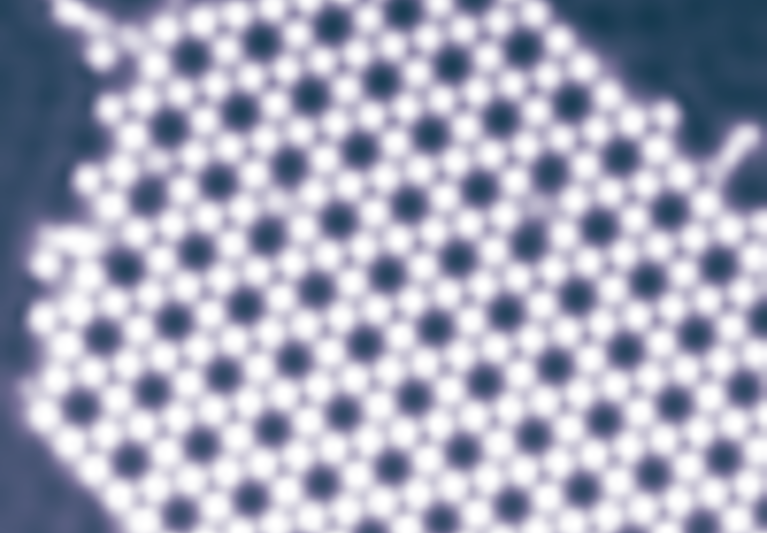
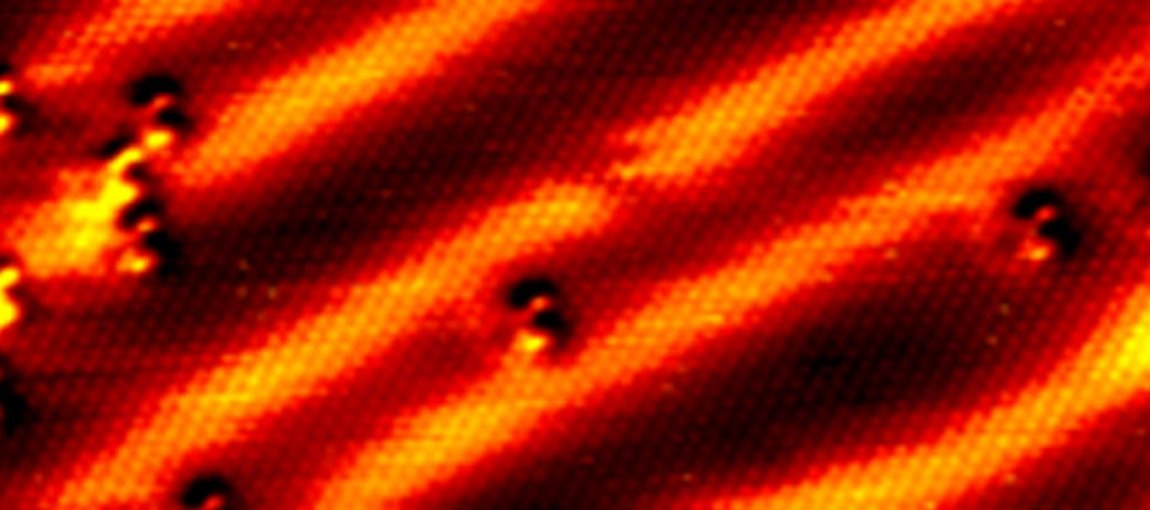
Scanning tunneling microscopy (STM) allows to map conductive surfaces on the nanometer scale by the use of the quantum mechanical tunneling effect. Hereby a sharp metallic tip (STM tip) is scanned across the surface at a distance of typically some tenth of a Nanometer. A bias voltage is applied to the junction in order to generate a tunneling current, which is used as feedback parameter and kept constant. As a result, the tip motion delineates along the scan direction a height profile proportional to the local density of states (LDOS) of the surface. When scanning line by line, a full 3D map of the surface can be reconstructed, even with atomic resolution. Due to the potential of this research technique, the Nobel Prize in physics was awarded to Gerd Binning and Heinrich Rohrer in 1986 for their development of the first STM together with Ernst Ruska. By means of STM, the surface's topography can be investigated, delivering information about its geometrical crystal structure, orientation of adsorbates and growth effects in real space. Thus it provides an intuitive insight into adsorbate-surface interactions, interface effects and, in general physics of surfaces with atomic-scale resolution. For moving the tip towards the sample and moving it along the scan area of interest two different approaches are implemented - both on basis of piezo motion. The coarse motor accomplishes the rough approach of the tip towards the surface, while the scan piezo is responsible for the scanning motion. After transfering the sample object of examination into the sample stage, the tip is approached towards the sample´s surface until they are in tunneling range. During this process, the challenge is to perform the approach motion of several milimeters fast enough and still stop this course motion with such an accuracy that the surface is not distupted by the STM tip. The metallic tip is driven with sub-atomic precision over the sample with the assistence of piezo elements. The standard scan piezo design consists of a scan tube with its outer electrode segmented in four sections. That allows lateral motion in +/- X and +/-Y directions by means of voltage pulses applied to the outer electrodes and high precision vertical motion in +/-z with voltage applied to the inner electrode. Special care has to be taken to the stability of the instrument. When probing samples with sub-nanometer resolution the disturbace by outer impacts (i.e. vibrations or even acoustical noises) must not disturb the tip sample distance nor the sensitive electronic measures. Consequently, the stiffness of the equipment and ist vibration insulation are key characteristics of a SPM. In the case of the Aarhus SPM Series, vibration isolation measures are already implemented into the STM head, such that external vibration damping systems are generally not required to perform high quality STM or SPM measurements. The tunneling current, detected by a current pre-amplifier has an intensity in the order of nano-ampere. Thus it is very sensitive to noise disturbances and all signal cables must be shielded.
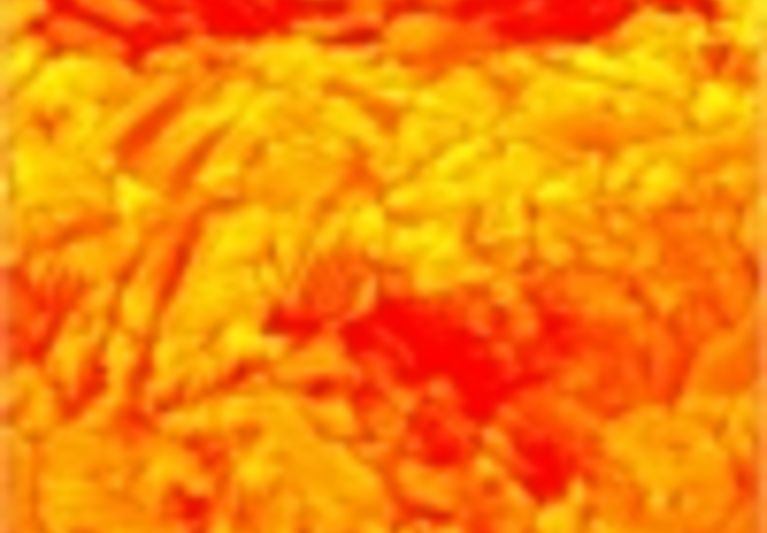
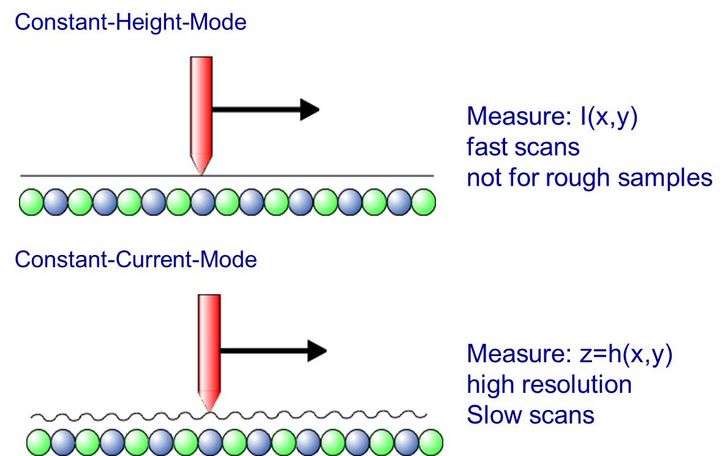
The feedback loop can be implemented by soft- or hardware. Usually it consists of a PI-controller (P: proportional term, I: integral term or time constant) where the set value is a given tunneling current (nA) and the control value is the Z-voltage. With the PI-Parameters the sensitivity of the controller can be tuned and adjusted to the acquiring speed for a topographic image. The Z-voltage is a measure of the sample' height at the position of the tip. This position can be recorded while scanning the tip over the surface pixel by pixel - line by line. The system's specific calibration defines the conversion of the relative piezo voltages to X,Y,Z coordinates in nm scale. Plotting the Z coordinate for each pair of X-,Y, coordinate in wrong-color representation visualizes the surface's topography. Under very stable conditions (no piezo drift/creep), and usually on very small scan areas, the above mentioned feedback loop can be switched off. In this mode, known as constant height measurement, the current signal can be mapped directly as a function of the X and Y coordinates.
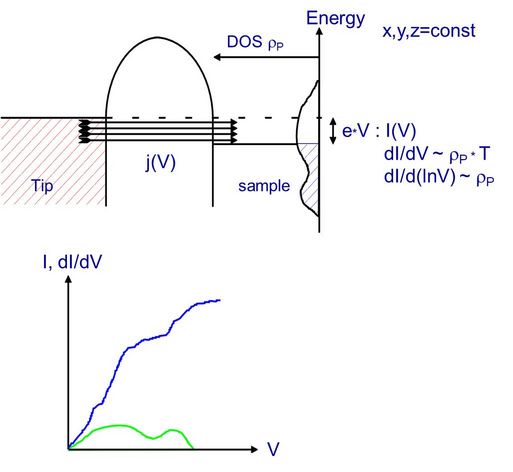
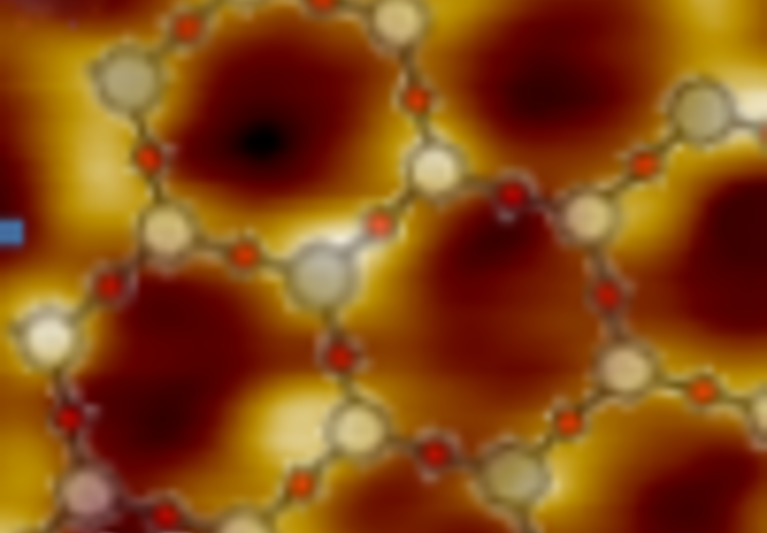
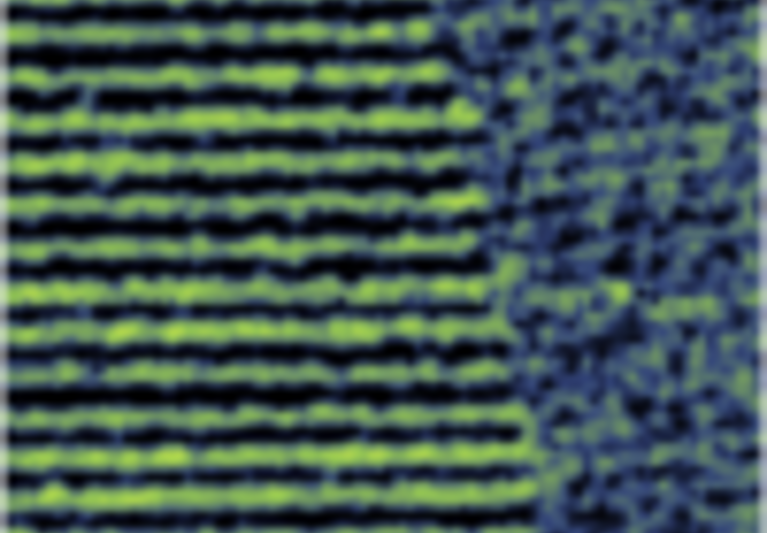
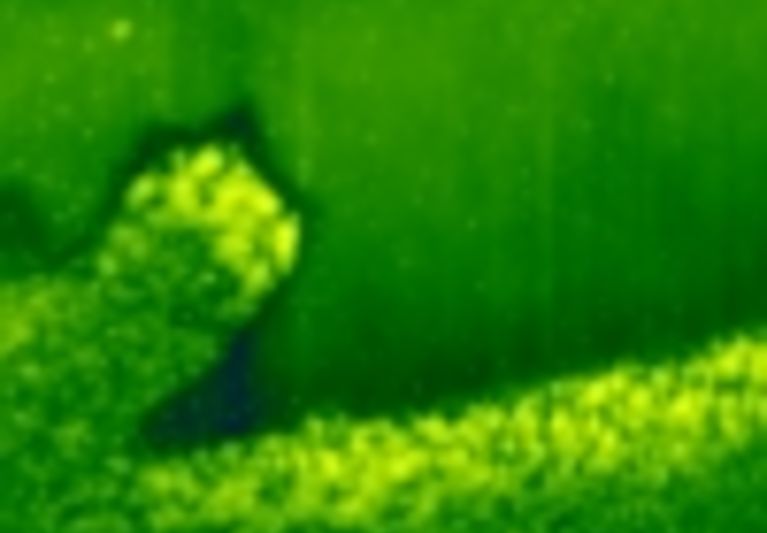
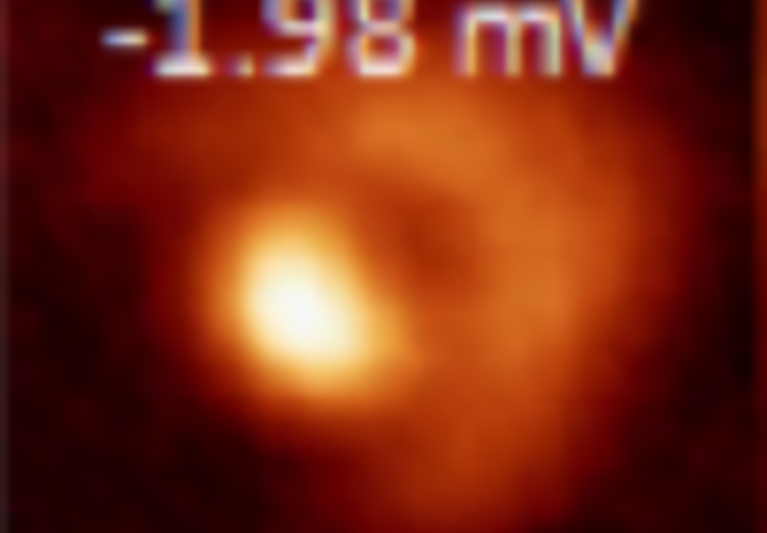
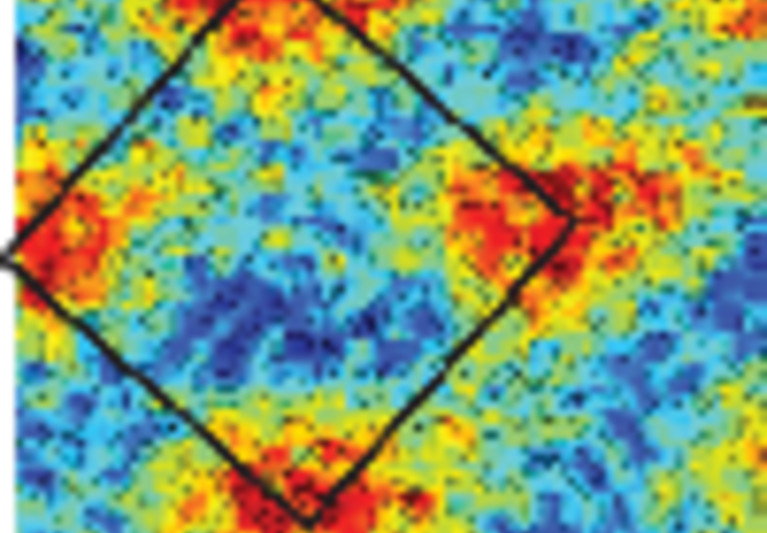
The local density of states (LDOS) of the sample surface and adsorbates can be probed by STM spectroscopy with sub-molecular resolution. There are several spectroscopic techniques depending on how the three available signals, i.e., tunneling current (I), tip-surface bias voltage (V), and the tip-surface distance (z) are recorded. The most common spectroscopy technique to map the local density of states (LDOS) fixes z, and records I while ramping V through the occupied (sample at negative voltage) and the unoccupied (sample at positive voltage) states of the sample. The derivative of the current signal (dI/dV) can be obtained by modulation lock-in techniques and provides the LDOS. When recording the STS signal simultaneously to the normal topography the contribution of the LDOS to the conductance at a given voltage can be visualized in color representation displaying the bidimensional local distribution of occupied/unoccupied states at a given voltage (energy). The combination of STM and STS is realized by recording a STS I-V spectrum in each pixel of a constant height STM image. As a result a three dimensional data set is obtained, where individual layers represent topographic images at given occupational states.
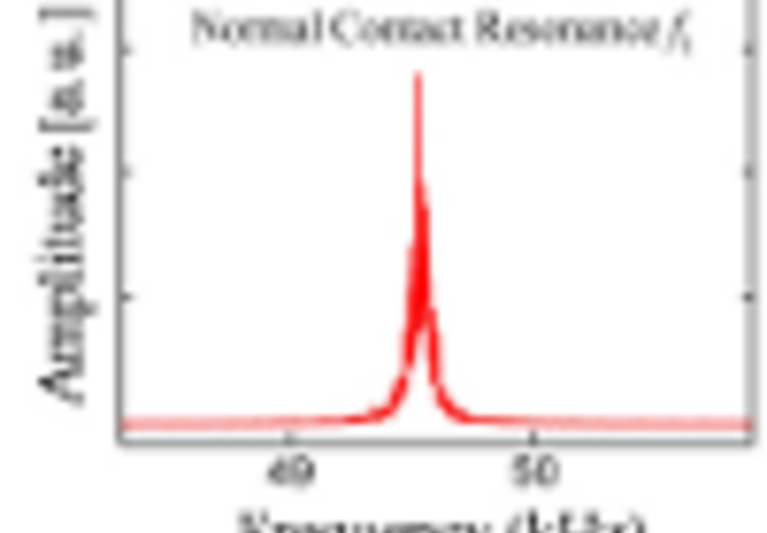
With modern dynamic sensors, like the KolibriSensor, static and dynamic STM is possible, while at the same time the ncAFM signal can be recorded in parallel by the frequency shift in the vicinity of the sample surface being a measure for the force on the tip.